I.INTRODUCTION
Tremendous growth and development in the field of sensor-based devices and multi-view cameras constantly enhance the popularity of human activity recognition (HAR). It is widely used in several applications such as security and surveillance [1,2], video retrieval [3], human–robot interaction [4], human–computer interaction [5], abnormal activity detection [6], entertainment [7], etc. In the literature [8,9], HAR is broadly classified into sensor-based and vision-based activity recognition. Dang et al. [8] classified HAR into sensor-based and vision-based based on data collection, preprocessing methods, feature engineering, and the training process. Hussain et al. [10] divided sensor-based HAR into three types based on sensor deployment. They are wearable, object-tagged, and dense sensing. In sensor-based HAR, activity is recognized by sensors or machines like accelerometer, gyroscope, smart watches, etc. Sensor-based HAR has gained popularity due to its small size, low cost, and better accuracy. However, wearing a tag throughout the day is inconvenient, requires more power dependency, depends on environmental conditions, etc [10]. On the other hand, vision-based HAR is based on video or sequences of frame captured by multi-view cameras. Hence, there is no need to wear the tag to gain popularity. Despite its merits, the performance has faced challenges, such as illuminance change, moving camera, blurring, occlusion, jilter, inter-class similarity, intra-class variability, moving background, and noise. To overcome these limitations, conventional or handcrafted, deep learning (DL) and hybrid methods have been introduced in the literature [11–13]. These approaches give prominent results on various publicly available datasets. However, handcrafted methods require domain experts to perform feature extraction. Further, these features are fed into a suitable classifier for recognizing a human activity. On the other hand, DL methods extract features automatically from raw input data. It gives the concept of end-to-end learning and able to replace handcrafted approach [12]. However, handcrafted features are still prominently used due to some limitations in DL approach. Some of the best-performing DL-based methods still dependent on handcrafted features, and these methods have a higher computational cost [12].
This paper proposes a novel handcrafted feature extraction approach to recognize human activity. The proposed method uses a frequency-based feature extractor named local phase quantization (LPQ) to find an efficient feature vector to recognize human activity in an unconstrained and realistic environment. The feature vector is then fed to a one-to-one multiclass support vector machine (SVM) classifier to recognize human activity. In literature, several combinations of handcrafted feature descriptors have been used to achieve comparable accuracy, but no one can achieve similar accuracy using a single feature. This paper uses a single feature descriptor, which gives approximately the same or greater accuracy on complex datasets. It is simple and efficient and outperforms a combination of features (handcrafted, DL, and hybrid). The main contributions of the proposed approach are listed below:
- 1.The prominent role of our current research is to observe and find appropriate features that can increase the efficiency of HAR and overcome the degradation of image quality due to the presence of camera motion, misfocused optics, movements in the scene, and environmental condition, inter-class similarity, and intra-class variability. Such efficacy is more important when dealing with complex video in an unconstrained environment.
- 2.A frequency-based LPQ feature descriptor has generated an efficient feature vector. The generated vector is fed as an input to the SVM classifier to recognize the human activity.
- 3.The approach has been trained and tested on publicly available datasets: University of Central Florida 101 (UCF101) [14] and Human Motion Database 51 (HMDB51) [15].
- 4.The approach has also outperformed the existing state-of-the-art approaches regarding computational efficiency.
The rest of the paper is divided into the following sections: Section II provides an overview of related work. Section III presents an overview of the proposed approach. Section IV discusses the experimental results and compared with the state-of-the-art techniques. The last section gives the conclusion and future scope.
II.LITERATURE REVIEW
The process of HAR in a realistic environment is still a challenging task. It suffers from different blurring, illuminance change, partial occlusion, complex background and foreground, complex structural arrangement of pixels, etc. Therefore, machine learning (ML) and DL-based approaches have been extensively used [11]. HAR mainly depends on how efficiently features are extracted from videos. Pareek and Thakkar [16] categorize features used in ML-based methods. They are trajectory-based, motion-based, texture-based, shape-based, gait-based, etc. Abdul-Azim and Hemayed [17] proposed trajectory-based HAR using the discriminative temporal relationship based on scale-invariant feature transform (SIFT) descriptor and SVM classifier. They obtained 95.36%, 97.77%, and 89.99% accuracies on Kungliga Tekniska högskolan (KTH), Weizmann, and UCF sports datasets, respectively. In motion-based techniques, optical flow and spatiotemporal filtering are used for capturing the motion of the target frame [16]. Bobick and Davis [18] proposed a motion-based HAR, invariant to linear changes in speed and run in real time. The shape-based feature provides human body dynamics and structure [16]. Vishwakarma et al. [19] present a shape-based feature with SVM classifier and found 100%, 85.80%, 95.5%, 93.25%, and 92.92% accuracies on Weizmann, INRIA Xmas Motion Acquisition Sequences (IXMAS), KTH, Ballet Movement, and Multi-view i3dPost datasets, respectively. Gupta et al. [20] proposed a gait-based feature for HAR on KTH and Weizmann datasets with 95.01% and 91.36% accuracies, respectively. Texture-based features provide a structural arrangement of intensities in an image. There are several texture-based features, and their combinations are available in literature, such as local binary pattern (LBP), local ternary pattern (LTP), LBP on three orthogonal planes (LBP-TOP), etc. [21–25]. Rahman et al. [26] proposed a HAR based on the combination of motion history image (MHI), LBP, and histogram of oriented gradients (HOG) feature with an SVM classifier. They obtained 86.67% and 94.3% accuracies on the KTH Action and the Pedestrian Action datasets, respectively. Wang et al. [27] have used the combination of HOG and LBP feature with a linear SVM classifier to recognize partial occluded human on National Institute for Research in Digital Science and Technology (INRIA) dataset with 97.9% accuracy. Carmona and Climent [28] used the template-based method to recognize human actions with Improved Dense Trajectories. The results were tested, and 89.3% and 65.3% accuracies were obtained on the UCF101 and HMDB51 datasets, respectively. Wang et al. [29] proposed a dense trajectories and motion boundary histogram (MBH)-based descriptors for HAR on nine publicly available datasets, KTH, YouTube, Hollywood2, UCF sports, IXMAS, University of Illinois Urbana Champaign (UIUC), Olympic Sports, UCF50, and HMDB51 with 94.2%, 84.1%, 58.2%, 88.0%, 93.5%, 98.4%, 74.1%, 84.5%, and 46.6% accuracies, respectively. Neggaz and AbdElminaam [30] used the combination of moment invariant (MI) mean block discrete cosine transform (MmDCT) and uniform LBP feature and neural network classifier for HAR. They have achieved 92.54%, 99.97%, and 99.9% accuracies on KTH, UCF11, and HMDB51 (for six activities) datasets, respectively. However, the approach fails to recognize the complex activities of UCF101 and HMDB51 datasets. Kushwaha et al. [31] proposed a linear feature fusion of optical flow and HOG feature for HAR with SVM classifier. The approach has achieved 99.3%, 97.96%, and 97.18% accuracies on UT Interaction, Institute of Automation, Chinese Academy of Sciences (CASIA), and HMDB51 datasets, respectively.
In a DL-based approach, Yu et al. [32] have proposed stratified pooling-based convolutional neural network (CNN) for HAR. The model has tested on UCF101 and HMDB51 datasets with 91.6% and 74.7% accuracies, respectively. Varol et al. [33] present a long-term temporal convolution (LTC)-based CNN model for activity recognition on the UCF101 and HMDB51 datasets and achieved 92.7% and 67.2% accuracies, respectively. Geng and Song [34] have proposed CNN-based HAR in which CNN is used for feature extraction, and SVM is used for pattern recognition. The result was tested on the KTH dataset and achieved 92.49% accuracy. Basak et al. [35] have recognized HAR using DL and swarm intelligence-based metaheuristic model. They have got 98.13%, 90.67%, and 89.98% accuracies on University of Texas at Dallas-Multimodal Human Action Dataset (UTD-MHAD), HMDB05, and Nanyang Technological University’s Red Blue Green and Depth information (NTU RGB+D) 60 datasets, respectively. Tran et al. [36] showed accuracy improvement of 3D CNNs over 2D CNNs using the residual learning framework on Sports-1M, Kinetics, UCF101, and HMDB51 datasets. Xia et al. [37] have proposed the combination of long short-term memory (LSTM) and CNN-based model for activity recognition in which data is fed into the LSTM network followed by CNN. The result has tested on three datasets: University of California Irvine (UCI), Wireless Sensor Data Mining (WISDM), and OPPORTUNITY, with 95.78%, 95.85%, and 92.63% accuracies, respectively. Yin et al. [38] have proposed 1-D CNN-based bidirectional LSTM parallel model with an attention mechanism for activity recognition. The performance was tested on UCI and WISDM HAR datasets and found 96.71% and 95.86% accuracies, respectively. Huang et al. [39] have proposed Three-Stream Network model in which spatial, temporal, and sequential features are fused. Further, features are fed into a multilayer perception classifier to recognize human activity. The results are tested on UCF11, UCF50, and HMDB51 datasets with 99.17%, 97.40%, and 96.88% accuracies, respectively. Luo et al. [40] have used Dense Semantics-Assisted Networks for HAR. They have used a dense semantic segmentation mask to encode the semantics for network training and improve the accuracy of the proposed network. The network has been tested on UCF101, HMDB51, and Kinetics datasets and achieved 96.69%, 72.88%, and 76.52% accuracies, respectively. Majd and Safabakhsh [41] have proposed a correlational convolution LSTM network for capturing the motion and dependency between spatial and time of the input videos for activity recognition. They have achieved 93.6% and 66.2% accuracies on UCF101 and HMDB51 datasets, respectively. Wang et al. [42] have proposed CNN-based Semantic Action-Aware Spatial-Temporal Features for action recognition with 71.2%, 45.6%, 95.9%, and 74.8% accuracies on Kinetics-400, Something-Something-V1, UCF101 and HMDB51 datasets, respectively. Xia and Wen [43] proposed a multi-stream based on key frame sampling for HAR. This framework consists three parts. First, it can use a self-attention mechanism to find the relationship between different regions; second, a key frame sampling mechanism is used to select a different video frame. Lastly, a deep spatiotemporal feature extraction mechanism is used to generate a fine grain feature, which is used for classification task. They have obtained 79.5%, 97.6%, 84.2%, and 71.6% accuracies on HMDB51, UCF101, Kinetics 400, and Something-Something Dataset, respectively. Saoudi et al. [44] used 3D CNN for feature extraction, followed by LSTM network with an attention mechanism for HAR. The network is tested on UCF101 and HMDB51 datasets and achieved 97.98% and 96.83% accuracies, respectively. Chen et al. [45] proposed improved residual CNNs with spatial attention modules. They have found 95.68% and 72.6% accuracies on UCF101 and HMDB51 datasets, respectively.
HAR based on the frequency domain are well known due to its robustness against blurring, geometric changes, and intensity changes [46]. In addition, it is computationally efficient for implementation [47,48]. Tran et al. [49] have used the frequency domain features to minimize the variability of effect and achieved 82.7% accuracy on the KTH dataset. Kumara et al. [50] have used foreground/background segmentation as preprocessing, discrete Fourier transform for feature extraction, and K-nearest neighbor (KNN) as a classifier for HAR. Lei et al. [51] have proposed a frequency-based descriptor for face recognition in low resolution. Ojansivu et al. [52] use local low-frequency Fourier phase information for rotation and blur-insensitive texture analysis. Ahonen et al. [53] use an LPQ-based feature to recognize blurred faces. Briassouli [54] describes motion statistics without requiring the estimation of optical flow, and it is useful where appearance features could be more informative. Foroosh et al. [55] have suggested estimating subpixel shifts using the phase correlation method. Feng et al. [56] have proposed 3D human skeleton-based HAR. They have partitioned the scene into several primitive actions based on the motion attention mechanism. They extract features from primitive motion and feed them into CNN architecture to recognize human action.
In this paper, we use the LPQ feature to overcome two main limitations of the HAR system: illumination variation and image blurring. Further, the result of the LPQ feature is fed into SVM classifier to recognize human activity. Moreover, the following section compares the results with those of the existing state-of-the-art approaches.
III.THE PROPOSED METHODOLOGY
This paper proposes a blur-invariant frequency-based feature descriptor for HAR. The descriptor can overcome illuminance changes and image degradation caused by camera motion, misfocused optics, movements in scene, and environmental condition. Work has been done to overcome the aforesaid limitations by considering a single or combination of different feature descriptors and feeding to ML classifiers [16]. However, there is a need of improvement in the performance of HAR in a blurring environment using single feature. It motivates the development of a robust blur-invariant LPQ feature for HAR on complex datasets. LPQ extracts texture information in a frequency domain. The extracted features are further fed into classifier to recognize human activity. Figure 1 shows an overview of the proposed approach. Frames are extracted in a video sequence, converted into grayscale image and resized to 128×128. Once data is preprocessed, texture-based LPQ features are extracted, and then the concatenation of the histogram of the features is fed to the SVM classifier to recognize activities.
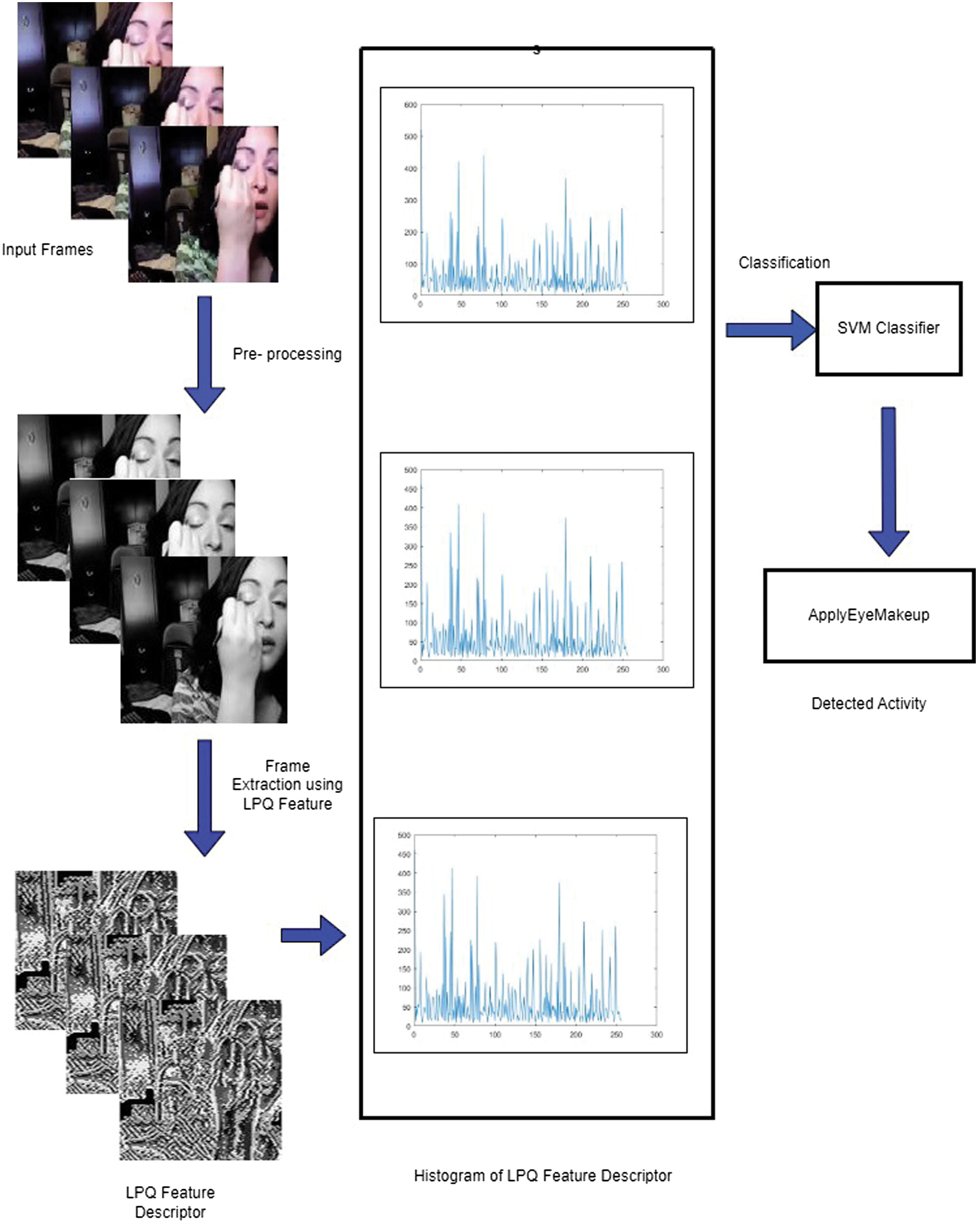 Fig. 1. An overview of the proposed approach.
Fig. 1. An overview of the proposed approach.
A.FEATURE EXTRACTION
In this step, the proposed feature vector is the concatenation of the histogram of all frames in a video. LPQ feature is first proposed by Ojansivu and Heikkila [57]. It is a blur-invariant feature descriptor. Blurring is one of the issues frequently occurring in vision-based HAR by camera motion, misfocused optics, and movements in the scene. In literature, the LPQ feature is used in various applications like facial expression recognition, person authentication system, and so on [51–53,58].
It shows the blur invariance property of an image by separating the magnitude and phase part of the discrete Fourier transform of the blurred image G(u). The blurred point spread function gives only two valued functions of the phase. In image processing, Fourier transform converts the signal from the spatial domain to the frequency domain. According to the Fourier transform property, a signal change in the spatial domain can reflect the change in the frequency domain. Let f(x) be an image. The corresponding frequency domain representation of image f(x) is obtained mathematically by the short-term Fourier transform (STFT) and is shown in equation (1) [57]:
where represents the transformed image at frequency u and pixel x, represents basis vector of an image f(x), fx is a vector containing all samples from neighborhood 3×3 pixel (Nx), and is the transpose of .
In LPQ, the transformation matrix is computed by separating the real and imaginary parts of the four lowest frequencies using STFT and is shown in equation (2). Further, the covariance matrix of the transformed frequency is obtained by assuming that the original image function f(x) is a result of a first-order Markov process and obtained from the equation (3). The whitening transform is calculated by using equation (4). Lastly, scalar quantization of is done by using equation (5). The range of is from 0 to 255 is shown by equation (6) [51]:
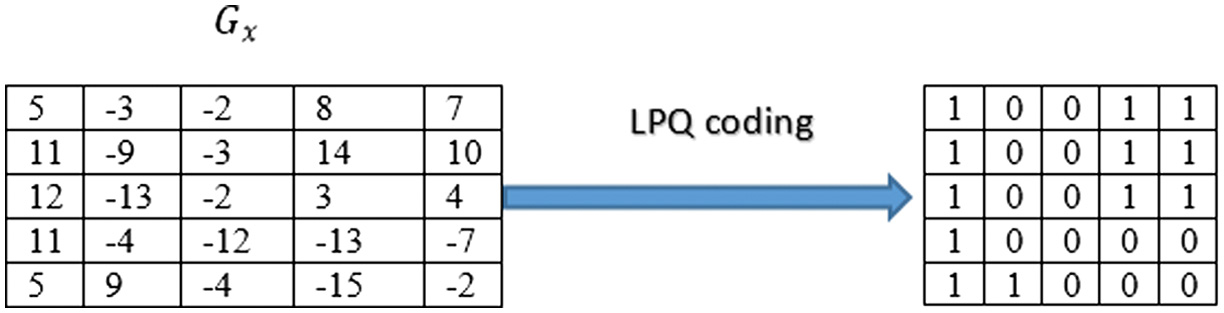
B.LPQ ENCODING
LPQ coding and formation of histogram is similar to LBP. However, LBP feature extraction is done in spatial domain and LPQ work in frequency domain. LPQ is a local texture feature which outperforms LBP and LTP. The process of LPQ encoding is shown in Fig. 2.
C.CLASSIFICATION
SVM [59–61] is one of the most commonly used supervised ML approaches for classification. The goal of SVM is to find optimal separating plane/hyperplane that can divide n-dimensional space into different classes. Here, we can ensure that the distance of hyperplane from its nearest data point on every class is maximum which is called the optimal hyperplane. The maximum distance of the data point to the hyperplane is called the margin. In this experiment, a one-to-one SVM classifier has been used to detect human activity using the LPQ feature in the n-dimensional plane.
IV.EXPERIMENTAL RESULTS & DISCUSSION
A.DATASET DESCRIPTION
The performance of the proposed approach has been extensively trained and tested on UCF101 [14] and HMDB51 [15] datasets. The datasets contain videos of different resolutions. The video files in the HMDB51 [15] dataset have different resolutions like 352 × 240, 320 × 240, 416 × 240, 424 × 240, etc., whereas the UCF101 [14] dataset has the exact resolution 320 × 240 for all the videos. For the simplicity of the experiment, we resized the video frame into 128 × 128. The entire dataset has been divided into training and testing dataset and are in the ratio of 7:3.
1.UCF101 DATASET
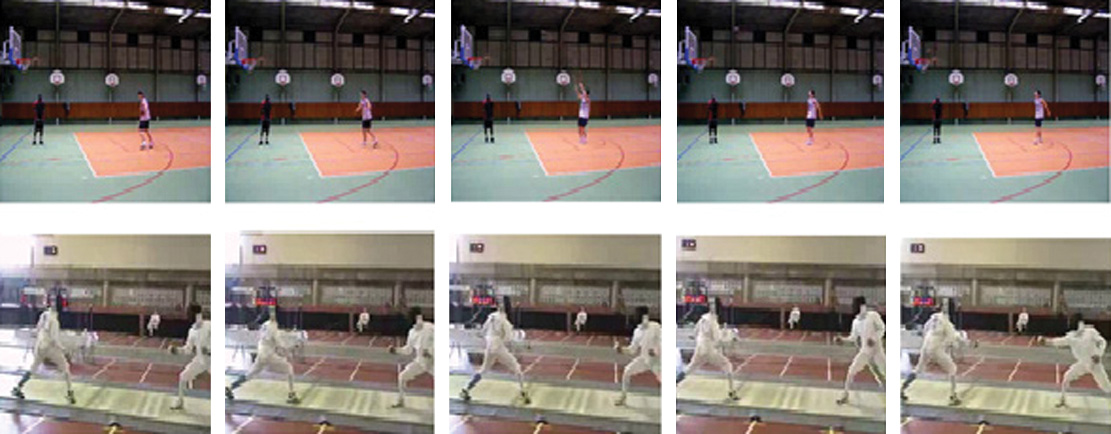
UCF101 [14] dataset has 101 human activity classes, which are divided into five categories: Human–object interaction, body–motion, human–human interaction, playing musical instruments, and sports. It has a fixed frame rate of 25 FPS and fixed resolution of 320 × 240. UCF101 dataset video includes camera motion, different lighting conditions, partial occlusion, cluttered background, and low-quality frame. Sample of the video frames of the dataset is shown in Fig. 3.
2.HMDB51 DATASET
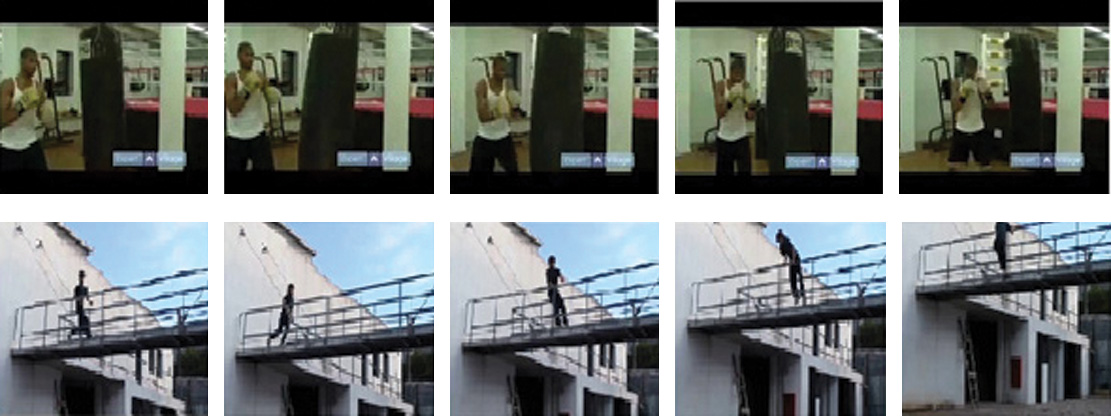
HMDB51 [15] has 51 human action categories collected from different sources like You Tube and Google videos. They are grouped into five classes: general facial actions: smile, laugh, crew, talk, etc.; facial action with object manipulation: smoke, eat, drink; general body movements: cartwheel, clap hands, climb stairs, etc.; body movement with object interaction: brush hair, catch, draw sword, golf, kick ball, ride horse, etc.; and body movement for human interaction: fencing, hug, kick some one, punch, shake hands. This dataset is most realistic videos including complex high-level activities having a complex background, camera motion, and varying luminance. Sample of the video frames of the dataset is shown in Fig. 4.
B.PERFORMANCE METRICS
To prove the authenticity and efficiency of the proposed approach, five performance metrics have been calculated named as accuracy, precision, sensitivity, specificity, and F-measure [62].
1.ACCURACY
Accuracy is the ratio between the correctly classified object to the total number of objects to be tested. Mathematically, accuracy can be written as:
2.PRECISION
Precision is calculated as the number of true positivity (TP) divided by the sum of true positivity and false positivity (). Mathematically, accuracy can be written as:
3.SENSITIVITY
Sensitivity is calculated as the number of true positivity (TP) divided by sum of true positivity (TP) and false negativity (FN). Mathematically, accuracy can be written as:
V.RESULTS AND DISCUSSION
In this section, the proposed approach has been analyzed on the mentioned datasets. Table I shows the performance of LPQ feature and SVM classifier-based HAR on five different metrics. The approach has achieved the considerable level of accuracy on the challenging dataset. It is found that the approach has obtained less accuracy on HMDB51 [15] dataset due to some inter-class variability. It is one of the common problems in which occurrences of intermediate actions of two activities from different class are same that results misidentification of accurate actions.
Table I. The performance metrics of HAR on UCF101 and HMDB51 dataset
| Performance metrics | UCF101 dataset | HMDB51 dataset |
|---|---|---|
| Accuracy (%) | 99.78 | 98.67 |
| Precision | .9978 | .9867 |
| Sensitivity | .9978 | .9867 |
| Specificity | .1000 | .9997 |
| F-measure | .9978 | .9867 |
Table II compares the proposed approach’s accuracy on both datasets with other state-of-the-art approaches. The table shows that the proposed approach has outperformed other handcrafted and DL approaches and is shown in the table as a boldface.
Table II. Comparison of proposed approach and the current state-of-art approaches on UCF101 and HMDB51 dataset
| Author(s) | Handcrafted/deep learning-based feature | Feature(s) | Accuracy (%) for UCF101 | Accuracy (%) for HMDB51 |
|---|---|---|---|---|
| Carmona and Climent [ | Handcrafted | Trajectory | 89.30 | 65.30 |
| Wang et al. [ | Handcrafted | Trajectory and motion | 89.10 | 48.30 |
| Kushwaha et al. [ | Handcrafted | Motion and shape | 97.18 | – |
| Neggaz and AbdElminaam [ | Handcrafted | Texture and shape | 99.97 | 99.92 |
| Luo et al. [ | Deep learning | Spatial and temporal | 98.12 | 77.35 |
| Majd and Safabakhsh [ | Deep learning | Spatial and temporal | 93.60 | 66.20 |
| Wang et al. [ | Deep learning | Spatial and temporal | 95.90 | 74.80 |
| Huang et al. [ | Deep learning | Spatial, temporal, and sequential | 97.40 | 96.88 |
| Xia and Wen [ | Deep learning | Temporal and sequential | 97.6 | 79.5 |
| Saoudi et al. [ | Deep learning | Spatial and temporal | 97.98 | 96.83 |
| Chen et al. [ | Deep learning | Spatial and temporal | 95.68 | 72.60 |
First, we compare the proposed approach with handcrafted-based method [28–31]. Neggaz and AbdElminaam [30] have achieved the approximately same accuracy as the proposed approach. They have performed the HAR using three features: MmDCT, Uniform Local Binary Patterns (ULBPs), and MIs. However, it has more mathematical computation to make an efficient feature vector. The dimension of the feature increases after the fusion of these three features. They have conducted the experiment on UCF101 [14] and HMDB51 [15] datasets by considering only six activities from both the datasets, respectively. However, the performance is limited to recognize complex activity of the stated dataset. Carmona and Climent [28] have used the template-based method for HAR which is combined with Improved Dense Trajectories. In this work, the Improved Dense Trajectories is obtained by the feature fusion of HOG, histogram of optical flow (HOF), and MBH feature. The resultant feature descriptor is more complex in terms of computation and size of feature vector than use of a single feature. Wang et al. [29] proposed a dense trajectories and MBH-based descriptors for HAR. It requires more time to combine dense trajectories and MBH features. Kushwaha et al. [31] used a linear feature fusion of optical flow and HOG feature for HAR with SVM classifier. The approach extracts large feature by HOG and optical flow combination. It results more computational time compared to single feature for extracting feature as well as classifying activity. On the other hand, the proposed approach is outperforming various DL methods [39–45] shown in Table II. The major challenge with DL methods is that it requires large sampled data to classify actions efficiently. It requires high computational cost, more memory, and large amount of input data. In addition, the proposed approach has also compared with Mohan et al. [63]. They have used the combination of HOG+LPQ with Fuz-SVM classifier for Object Face Liveness Detection on their own dataset. In this paper, the combination of HOG+LPQ feature with multiclass SVM has been tested on HMDB51 dataset and found the result shown in Table III. The single feature, that is, LPQ, has given comparable results in terms of accuracy. However, the number of features extracted in the combination is approximately 32 times higher than the number of features extracted by single feature. Moreover, the computational time required for feature extraction per video and classification also takes more time in the combination as compared to single feature.
Table III. Comparison between HOG+LPQ and LPQ feature with SVM classifier on HMDB51 dataset
| Feature combination | # Feature extracted | Execution time for feature extraction (per video) in sec. | Execution time for classification in sec. | Accuracy (%) |
|---|---|---|---|---|
| HOG+LPQ | 8356 | 44.57 | 3654.47 | 99.48 |
| LPQ | 256 | 37.17 | 158.75 | 98.67 |
Therefore, the proposed approach has outperformed the state-of-the-art approaches over HMDB51 [15] and UCF101 [14] datasets. HMDB51 [15] contains more blurred images compared to UCF101 [14]. Hence, the proposed approach is efficient and invariant toward blurring.
VI.CONCLUSION AND FUTURE DIRECTIONS
In this paper, the frequency-based technique has been used to recognize human activity. Here, LPQ feature descriptor has been considered to extract useful feature from input video and then fed into one-to-one SVM classifier to recognize human activity. The feature is more robust against the illuminance change and blurring caused by the camera motion, misfocused optics, movements in the scene, and environmental conditions. The proposed approach has achieved 99.78% and 98.67% accuracies on UCF101 and HMDB51 datasets, which is more complex and challenging datasets in HAR. The approach has also outperformed the existing state-of-the-art approaches in terms of computational cost without compromising the accuracy of HAR.